所有圖書分類
群類別


輕課程 micro:bit與iMoto BitRacer智慧車完美結合線迷宮競賽 - 使用MakeCode程式設計 - 最新版 - 附MOSME行動學習一點通:診斷.評量.影音.擴增.加值
書號:PN009
作者:蘇景暉 林立中
出版商:台科大圖書
初版日期:2022.05.04
最新出版日期:2022.05.04
ISBN:9789865234195
eISBN:9789865236588
頁數:240頁
規格:彩色 / A6開
適用年齡:9歲以上
建議售價:NT$420
你可能需要...
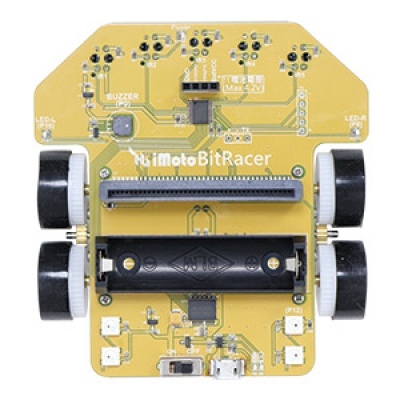
本書希望透過BitRacer、micro:bit微型電腦以及MakeCode積木程式的撰寫環境,完成以下輪型機器人的學習目標:
1.學會以程式控制 BitRacer 輪型機器人上的彩色LED燈、蜂鳴器、紅外線感測器以及運動控制等。
2.藉由紅外線感測器對於紅外線反射量的類比讀值,熟悉使用權重,或是內差演算法,及其對應的程式,精確估測賽道相對於BitRacer輪型機器人中心線的位置。
3.熟悉如何使用BitRacer中心線與賽道間的誤差數值,以及比例差分回授控制的程式實現和調校方法,達成BitRacer輪型機器人,快速而平順的循線運動。
4.藉由超音波感測器偵測與障礙物間的距離,練習循線與避障兩種不同運動方式控制程式的整合。
5.學習並且理解樹狀線迷宮搜尋終點,以及找出起點到終點間最短路徑的方法。再將它實現在micro:bit微型電腦的程式中,藉此來控制BitRacer輪型機器人在任意的樹狀線迷宮中,自主的找到終點與最短路徑。
1.學會以程式控制 BitRacer 輪型機器人上的彩色LED燈、蜂鳴器、紅外線感測器以及運動控制等。
2.藉由紅外線感測器對於紅外線反射量的類比讀值,熟悉使用權重,或是內差演算法,及其對應的程式,精確估測賽道相對於BitRacer輪型機器人中心線的位置。
3.熟悉如何使用BitRacer中心線與賽道間的誤差數值,以及比例差分回授控制的程式實現和調校方法,達成BitRacer輪型機器人,快速而平順的循線運動。
4.藉由超音波感測器偵測與障礙物間的距離,練習循線與避障兩種不同運動方式控制程式的整合。
5.學習並且理解樹狀線迷宮搜尋終點,以及找出起點到終點間最短路徑的方法。再將它實現在micro:bit微型電腦的程式中,藉此來控制BitRacer輪型機器人在任意的樹狀線迷宮中,自主的找到終點與最短路徑。
Chapter 1 認識 BitRacer 與 micro:bit
課前知識:BitRacer 智慧車 與 micro:bit
實作01 來一首音樂吧!
實作02 BitRacer 動起來!
Chapter 2 紅外線感測器的原理與應用
實作03 反射光的物理
實作04 舞動 LED
實作05 感測器校正
實作06 線在哪裡?
Chapter 3 BitRacer 的運動控制
實作07 跑起來吧!
實作08 看誰跑得快!
實作09 尖角過彎,路徑判斷
實作10 靠站停車囉!
Chapter 4 超音波感測器的原理與應用
實作11 聲波反射的物理
實作12 看誰彈得好聽!
實作13 此路不通、改道行駛!
Chapter 5 線迷宮中的 BitRacer
實作14 BitRacer 的分解動作
實作15 線迷宮路口判斷
實作16 線迷宮最短路徑演算法
實作17 實戰線迷宮!
附錄
附錄一 客製化MakeCode 積木
附錄二 線迷宮鼠競賽介紹
附錄三 實力評量解答與提示
課前知識:BitRacer 智慧車 與 micro:bit
實作01 來一首音樂吧!
實作02 BitRacer 動起來!
Chapter 2 紅外線感測器的原理與應用
實作03 反射光的物理
實作04 舞動 LED
實作05 感測器校正
實作06 線在哪裡?
Chapter 3 BitRacer 的運動控制
實作07 跑起來吧!
實作08 看誰跑得快!
實作09 尖角過彎,路徑判斷
實作10 靠站停車囉!
Chapter 4 超音波感測器的原理與應用
實作11 聲波反射的物理
實作12 看誰彈得好聽!
實作13 此路不通、改道行駛!
Chapter 5 線迷宮中的 BitRacer
實作14 BitRacer 的分解動作
實作15 線迷宮路口判斷
實作16 線迷宮最短路徑演算法
實作17 實戰線迷宮!
附錄
附錄一 客製化MakeCode 積木
附錄二 線迷宮鼠競賽介紹
附錄三 實力評量解答與提示
資源檔案 / 電子書試閱
| 學習資源下載
服務時間:週一至週五 08:30~18:00 (例假日除外)
服務信箱:tkdbook@jyic.net
服務信箱 | 服務專線:02-2908-0313
傳真號碼:02-2908-0112
公司地址:242新北市新莊區中正路649之9號8樓![]()

昨日人次:6835
今日人次:2430
線上人數:12
今日人次:2430
線上人數:12